Overview
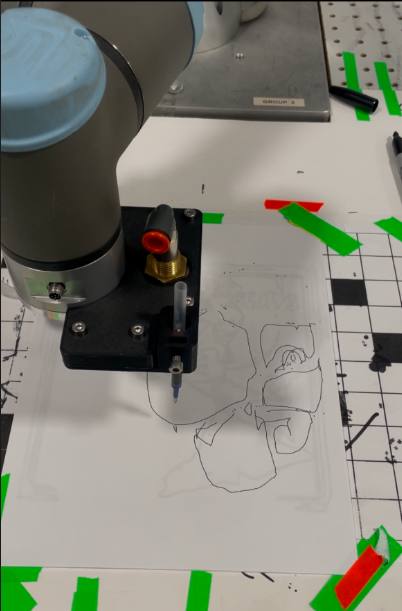
Programmed a UR3 6-DOF robot arm to draw images at 2,000-keypoint accuracy using OpenCV for contour extraction and inverse kinematics for coordinate transformations. Developed a non-linear epsilon approximation for contour simplification and a task-ordering algorithm to minimise pen lifts. Built unique motion features — smooth end-effector lift between contours and a full canvas trace before the final drawing pass — to account for real-world robot acceleration and positioning error.