Overview
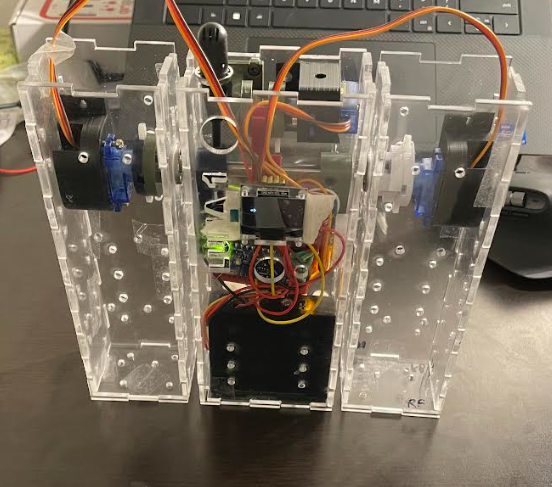
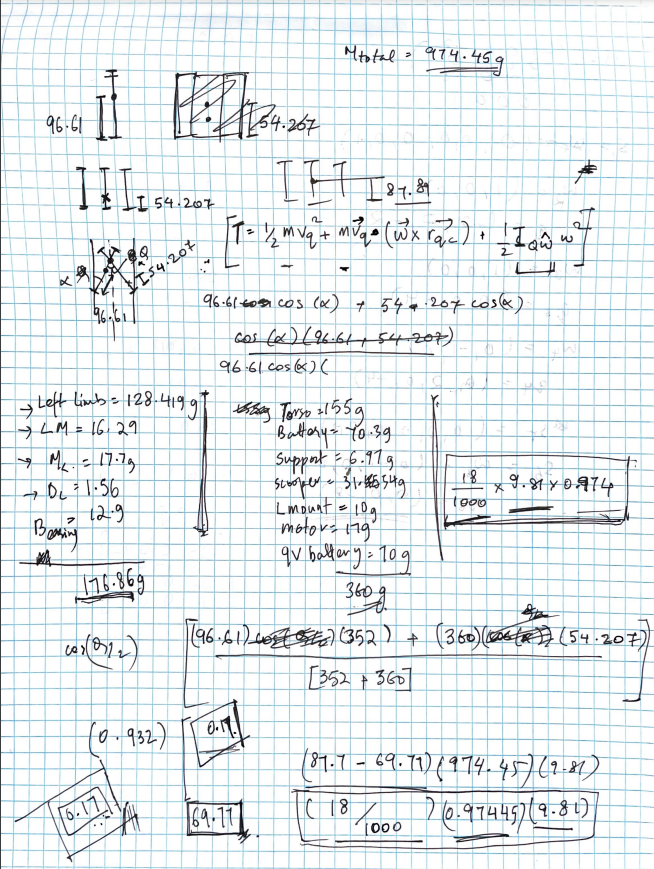
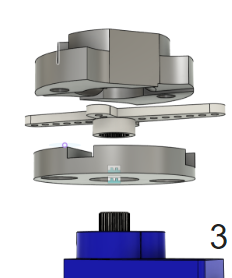
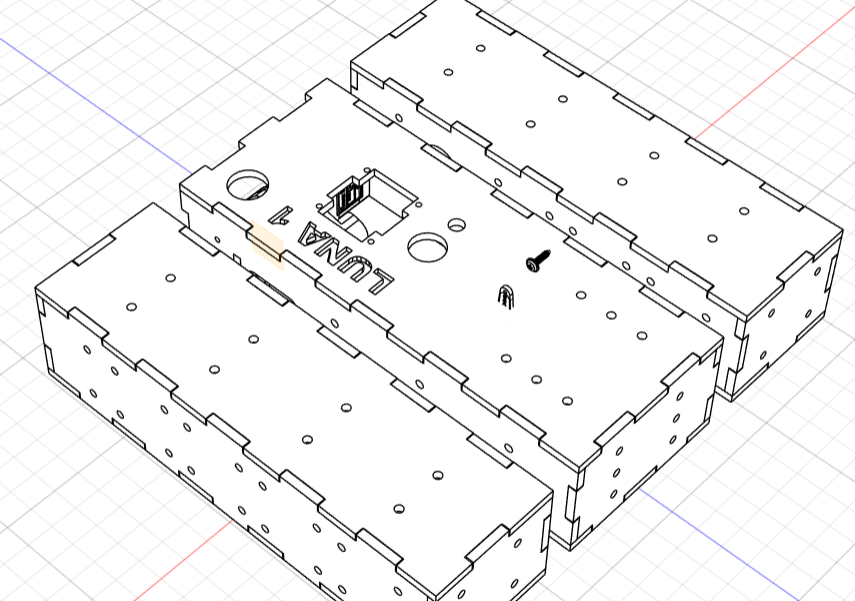
Built a three-legged walking robot inspired by TARS from Interstellar — working prototype in 20 days on a $150 budget. Designed the full drivetrain, motor mounts, chassis, and box-jointed laser-cut acrylic body from scratch in Fusion 360. Used rotational dynamics and centre-of-mass hand calculations at every gait configuration to solve for tip-over conditions. Devised a speed-control method for servos to accurately model walking motion. Integrated voice recognition, OLED display, and Arduino motor control. All functional objectives met except interrupt-based command override.