Overview
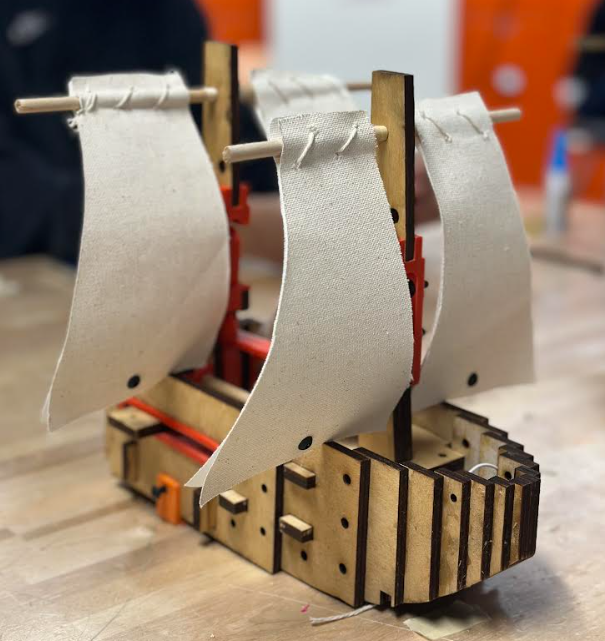
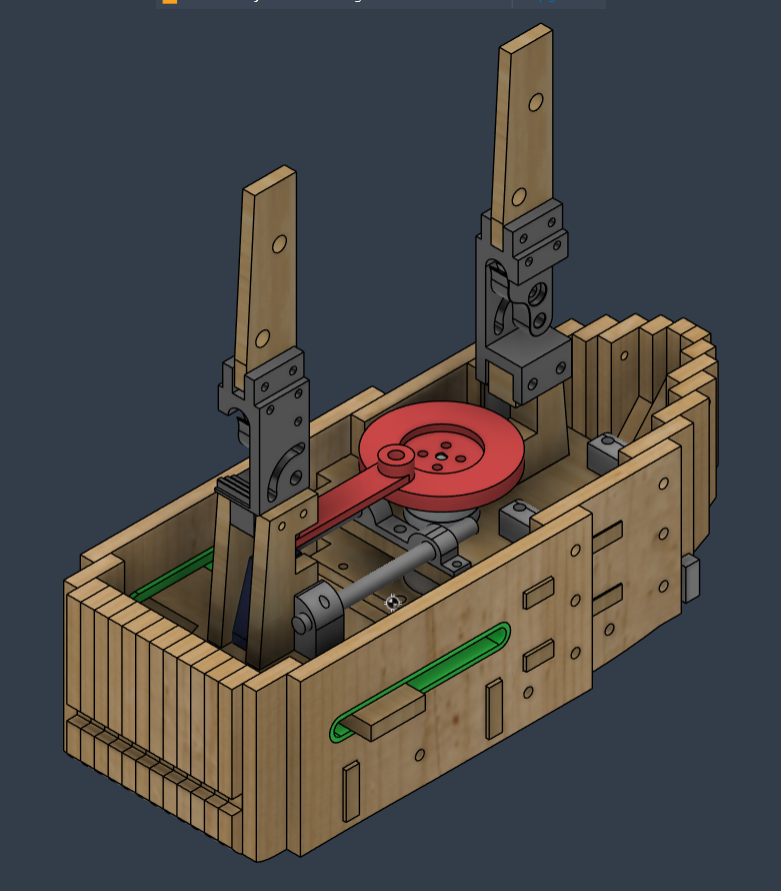
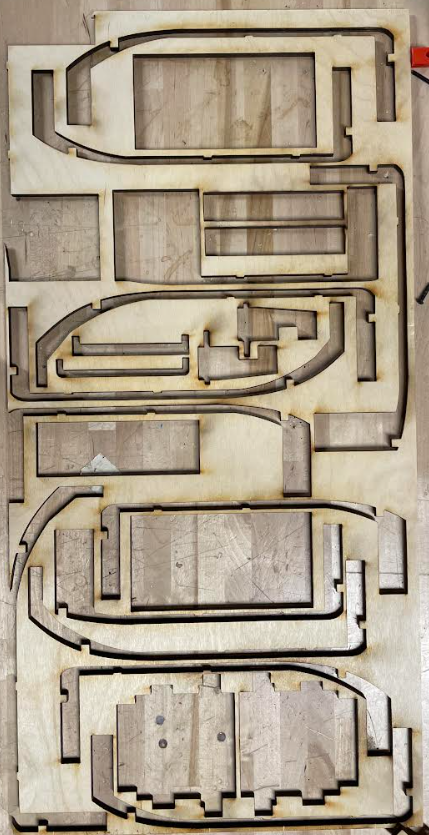
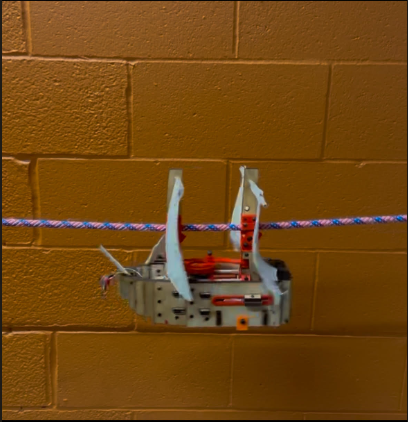
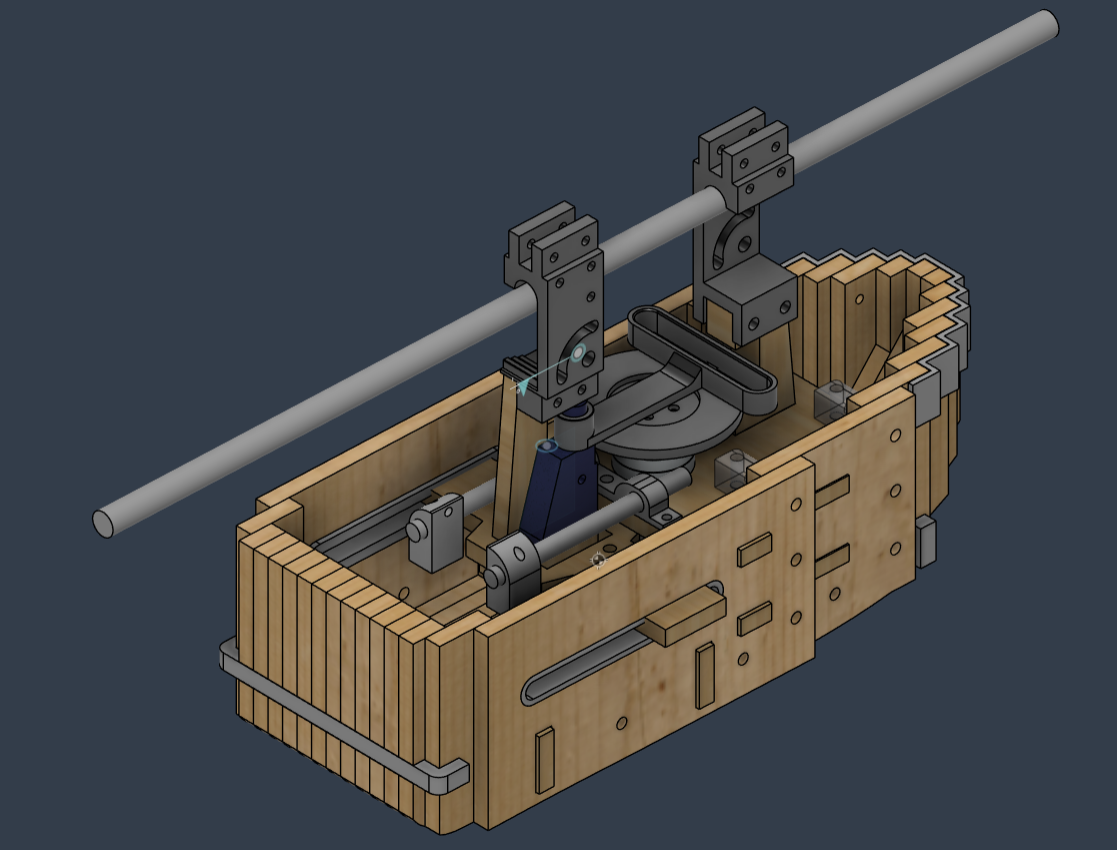
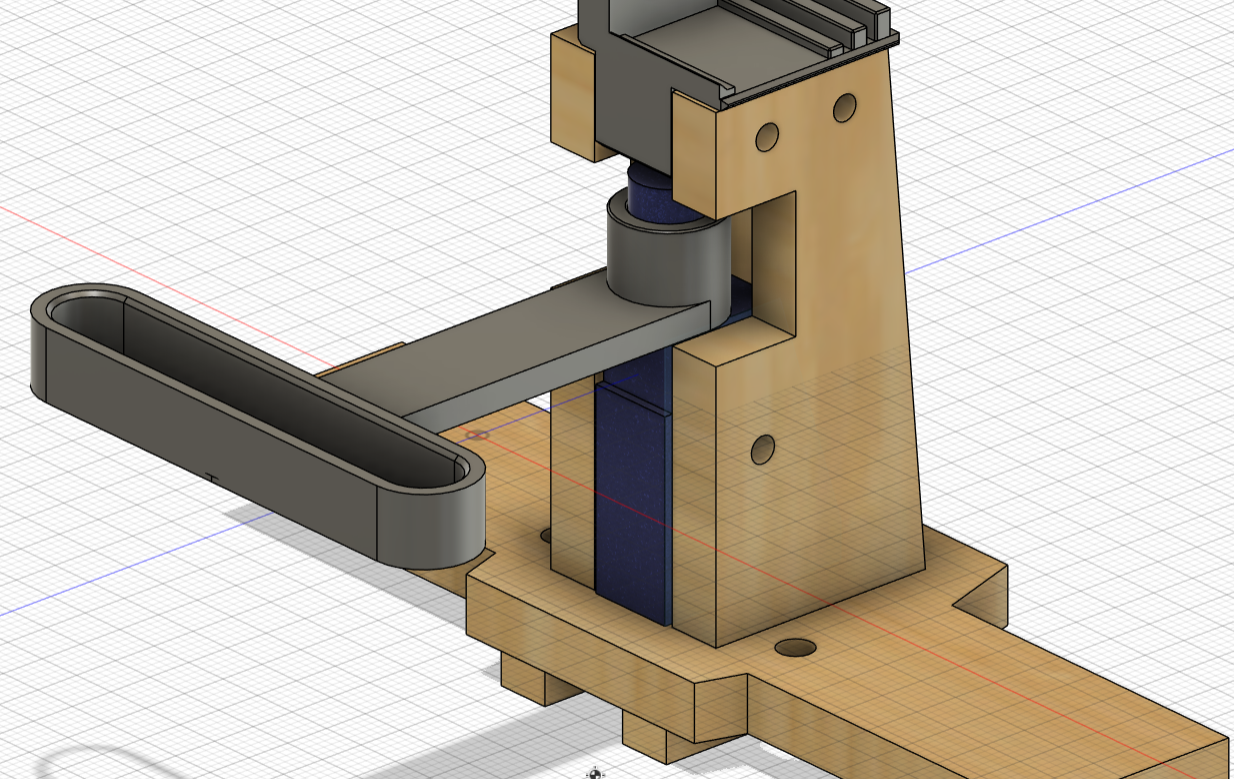
Built a robot that traverses 8m of paracord inverted, without wheels or pulleys, at a minimum velocity of 2m/min. The mechanism converts rotational motor output to linear gripping motion via a novel one-way locking mechanism suited to paracord geometry and fully 3D printable. The body is 80% laser-cut wood — box-jointed and inspired by Miyadaiku Japanese carpentry — chosen for cost, machinability, and material character. Gait was analysed in Python to understand and eliminate jerk motion between contact phases.