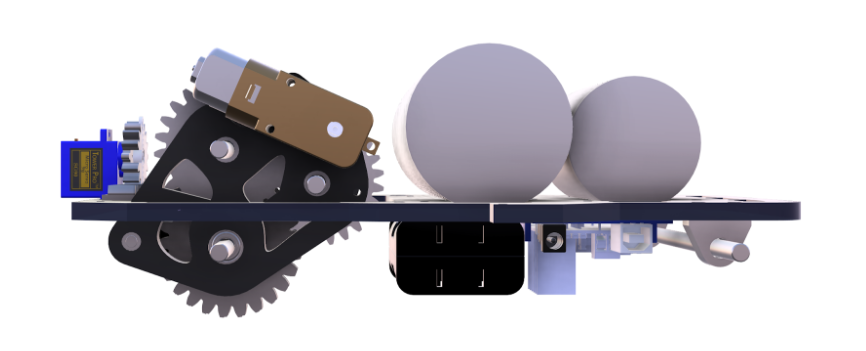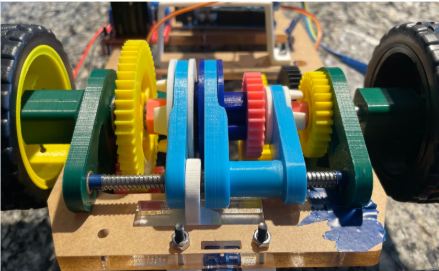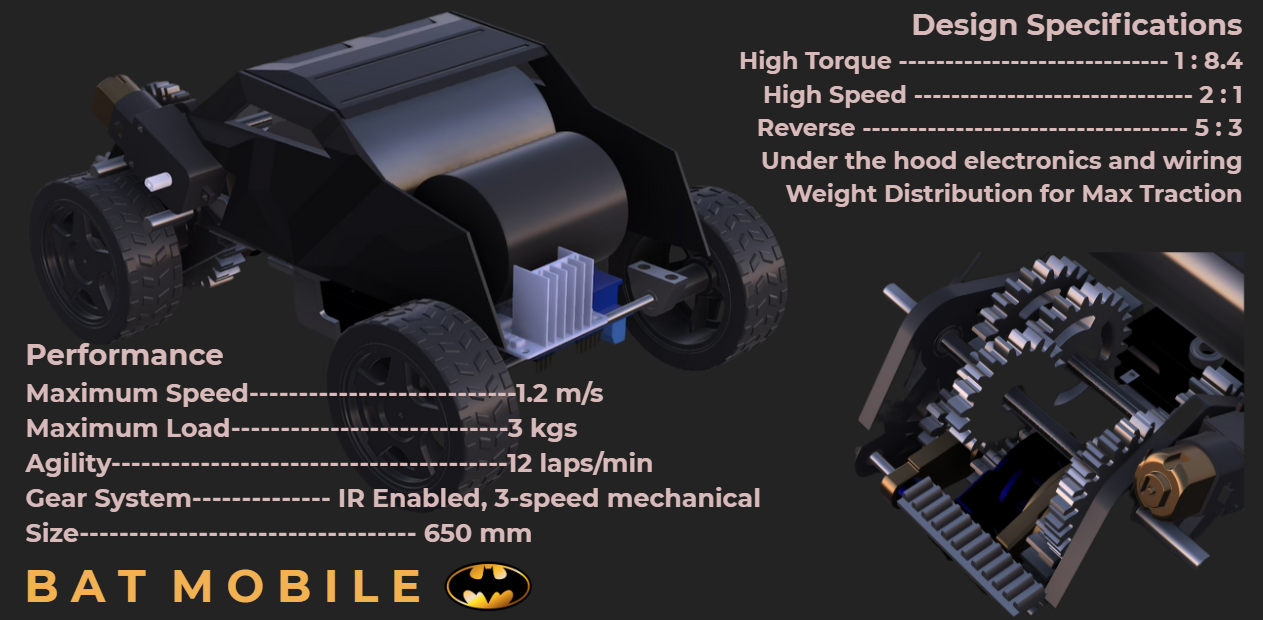
A Batmobile-themed remote-controlled car built for UIUC's ME 371 Robot Heptathlon, competing across five events: strength, speed, agility, weight, and size. The car features a custom 3-speed transmission with high torque (8.44:1), high speed (1:2), and reverse — all switched via a servo-actuated dog clutch system controlled by an IR remote.
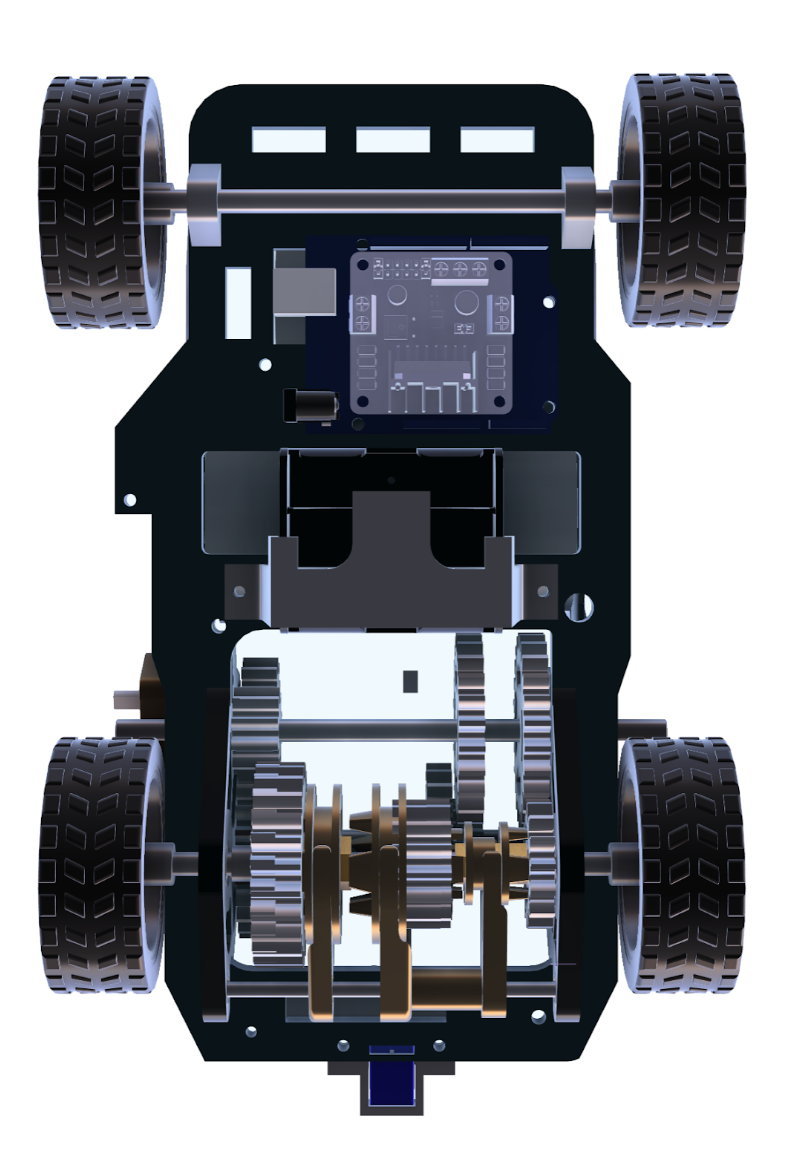
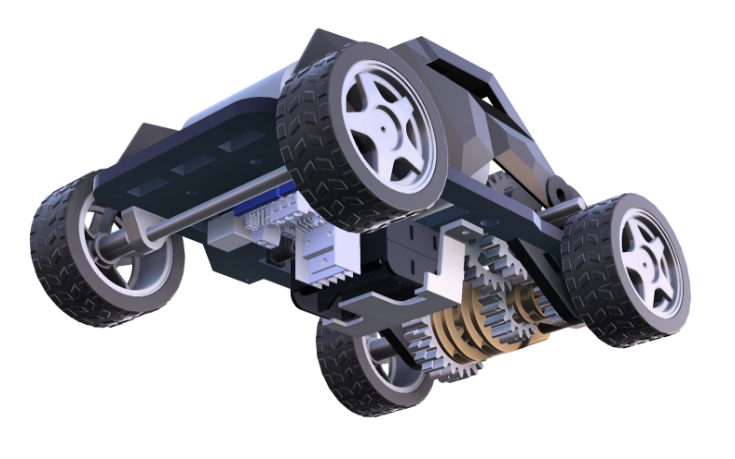
The chassis is laser-cut acrylic with weight-saving cutouts, while all gears, clutches, and mounts were custom-designed and 3D printed in PLA. The entire electronics package — battery, motor controller, and IR receiver — was tucked under the chassis to keep the profile low and the center of mass over the rear drive wheels for better traction. Total build cost came in at $44.
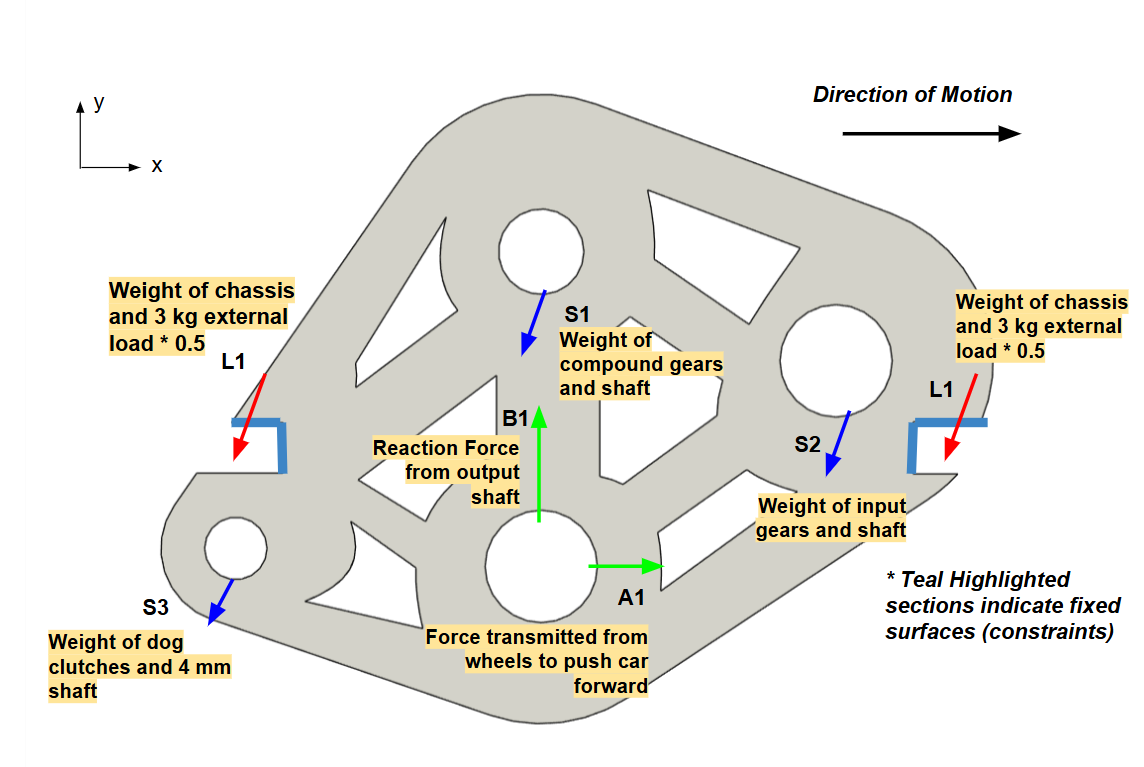
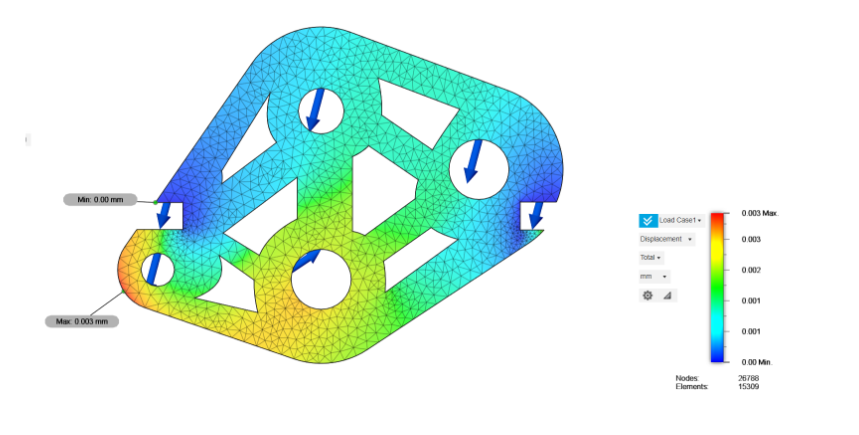
Ran full fatigue analysis on the transmission spring using the Modified Goodman method, confirming 1M+ cycle life under cyclic loading. A Finite Element Analysis (FEA) of the 3D-printed transmission wall showed a minimum safety factor of 12.7 under worst-case loading — the car climbing a 15° incline with a 3 kg payload.